В работе служб МЧС и спасателей, которые устраняют последствия стихийного бедствия иди техногенной катастрофы критически важный фактор — надёжная связь. Но иногда катастрофы происходят в чрезвычайно удалённой местности, где работают только спутниковые телефоны. Как поднять нормальную сеть для всей группы?
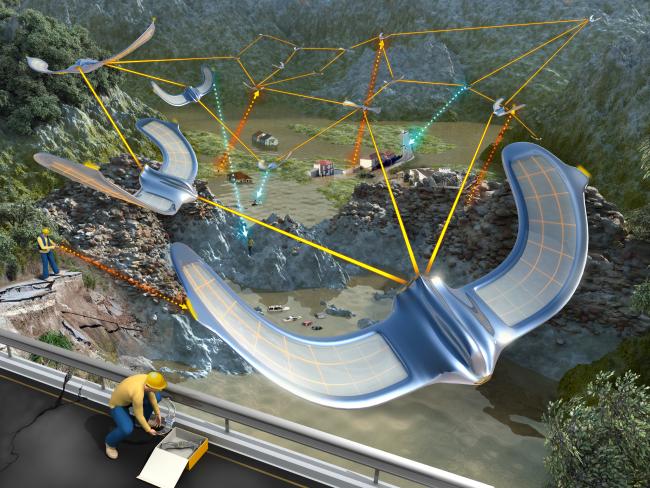
Лаборатория саморегулирующихся систем в Политехническом институте Лозанны разработала проект SMAVNET (The Swarming Micro Air Vehicle Network), который должен решить эту проблему. Они предлагают использовать роевую сеть из десяти беспилотных летательных аппаратов, которые в считанные минуты организуют беспроводную сеть на обширной территории. Достаточно бросить их в воздух (видеосъёмка процесса развёртывания сети под хабракатом).
Преимущества такой системы — быстрое время развёртывания, широкий радиус покрытия, дешёвое оборудование, простота запуска (протоколы разработаны таким образом, что даже неспециалист может без труда запустить сеть).
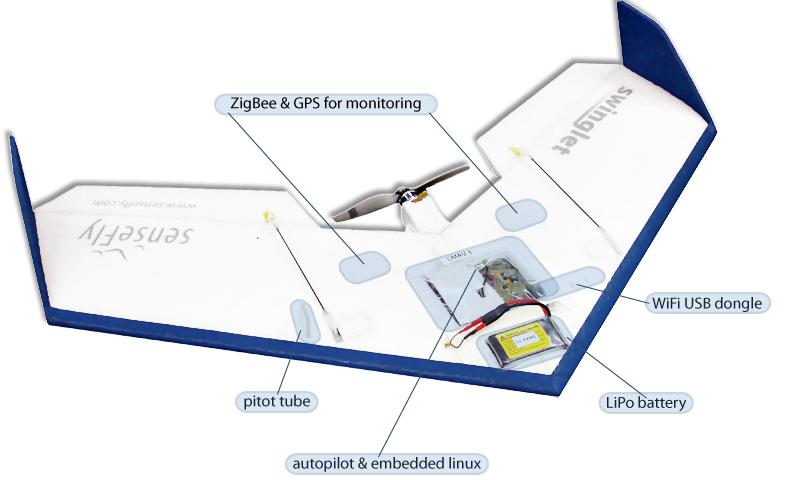
Каждый робот сделан из лёгкой формы полипропилена, весит 420 г, размах крыльев 80 см.
Для управление самолётами используются элевоны на крыльях. Электромотор закреплён в задней части, литий-полимерного аккумулятора хватает на 30 минут автономной работы. Автопилот контролирует высоту, скорость и радиус поворота. Встроенный в автопилот микроконтроллер использует минималистскую стратегию, получая данные всего от трёх сенсоров: гироскопа и двух сенсоров давления. Контроллеры беспилотника сделаны на плате Toradex Colibri PXA270 под управлением Linux. Модуль GPS и передатчик ZigBee (XBee PRO) нужны, чтобы записывать траекторию движения дрона.

Как видно на первом видеоролике, для развёртывания WiFi-сети достаточно просто включить дронов и подбросить их в воздух. Посадку нужно инициировать с наземного интерфейса.
На втором видео объясняются алгоритмы связи в рою дронов (позаимствованы у муравьёв).
Источник: habrahabr.ru
Лаборатория саморегулирующихся систем в Политехническом институте Лозанны разработала проект SMAVNET (The Swarming Micro Air Vehicle Network), который должен решить эту проблему. Они предлагают использовать роевую сеть из десяти беспилотных летательных аппаратов, которые в считанные минуты организуют беспроводную сеть на обширной территории. Достаточно бросить их в воздух (видеосъёмка процесса развёртывания сети под хабракатом).
Преимущества такой системы — быстрое время развёртывания, широкий радиус покрытия, дешёвое оборудование, простота запуска (протоколы разработаны таким образом, что даже неспециалист может без труда запустить сеть).
Каждый робот сделан из лёгкой формы полипропилена, весит 420 г, размах крыльев 80 см.
Для управление самолётами используются элевоны на крыльях. Электромотор закреплён в задней части, литий-полимерного аккумулятора хватает на 30 минут автономной работы. Автопилот контролирует высоту, скорость и радиус поворота. Встроенный в автопилот микроконтроллер использует минималистскую стратегию, получая данные всего от трёх сенсоров: гироскопа и двух сенсоров давления. Контроллеры беспилотника сделаны на плате Toradex Colibri PXA270 под управлением Linux. Модуль GPS и передатчик ZigBee (XBee PRO) нужны, чтобы записывать траекторию движения дрона.
Как видно на первом видеоролике, для развёртывания WiFi-сети достаточно просто включить дронов и подбросить их в воздух. Посадку нужно инициировать с наземного интерфейса.
Источник: habrahabr.ru
Комментариев нет:
Отправить комментарий